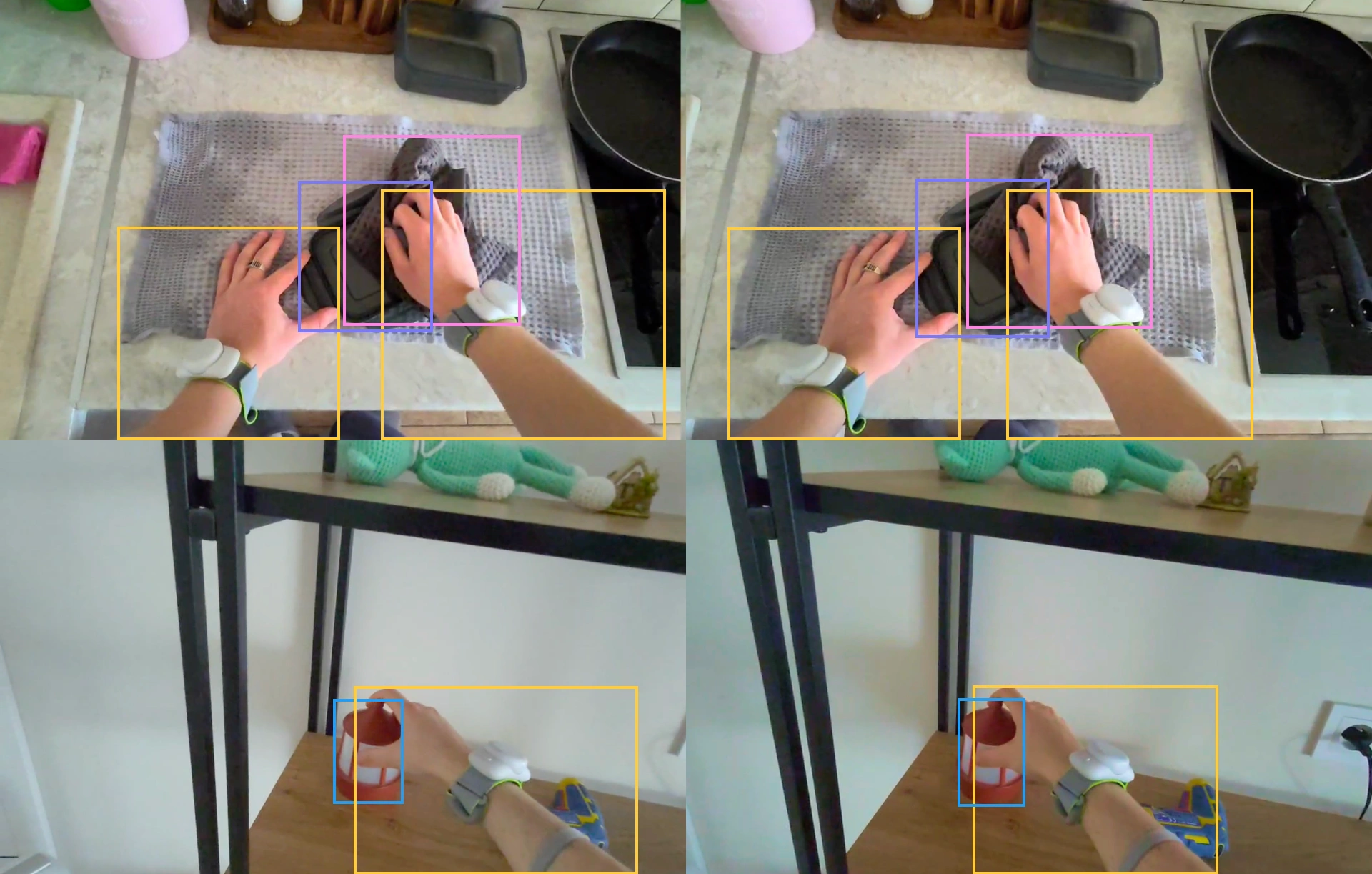








Egocentric Video Dataset
This egocentric dataset contains first-person videos of daily activities in home environments, designed for Physical AI, robotic systems, manipulation tasks, […]
- Tasks
- Hand Activity Recognition, Egocentric Action Recognition, Hand-Object Interaction
- Hours of recordings
- 4,050
- Video source
- Pico 4 Ultra VR headset (egocentric) + 4 Zed stereo cameras (spatial depth)
- Sensor data
- IMU signals — accelerometer, gyroscope, magnetometer
- Activities
- Sorting, transferring, folding, assembly/disassembly, tool use, two-handed manipulation